MetaMotion R - Sensor Fusion Slower Sample Rate

Hello,
I am using Euler angles in MetaMotion-R to track head orientation in a sitting posture.
I was trying to change the streaming frequency of sensor fusion (NDoF) but I'm facing a couple of issues.
The default values for NDoF mode are Acc = 100Hz, Gyro = 100Hz, and** Mag = 25Hz**
I attempted to change the C modules that are responsible for the sensor fusion mode (SensorFusionBoschImpl.class):
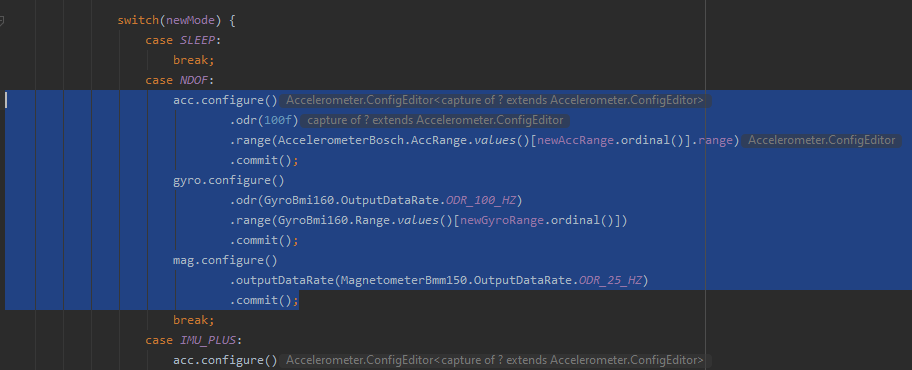
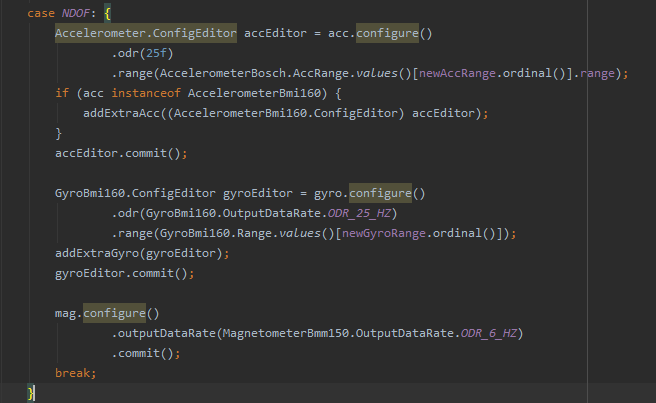
To be specific, I tried to change the ODR values to Acc = 25Hz, Gyro = 25Hz, and** Mag = 6Hz **as shown below:
After building the app and testing on the phone, it didn't show any difference in the output (data kept outputting with the same default rate).
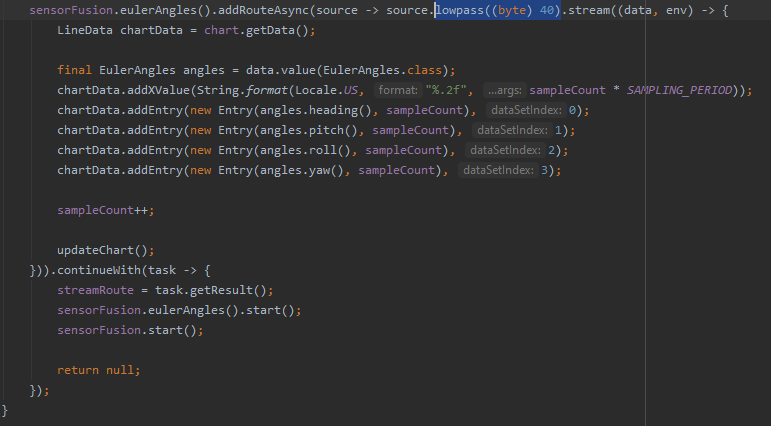
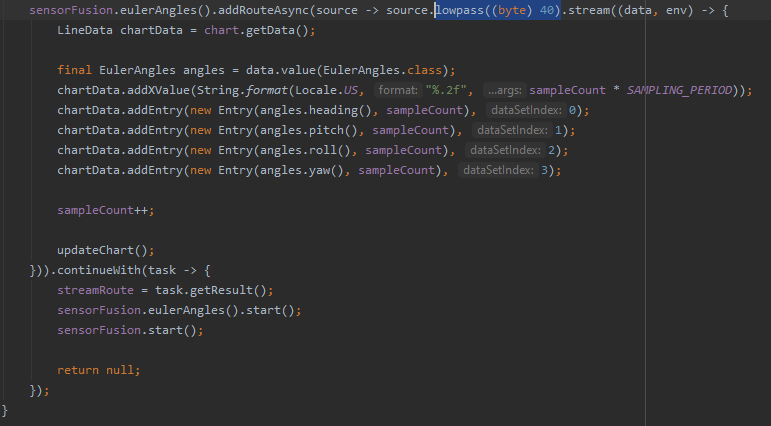
So I tried to apply a lowpass filter to the Euler angles stream (to create an averaging window):
That compiled okay but I stopped receiving values completely from my Euler angles stream...
**How can I decrease the frequency of Euler angles to avoid oversampling?
Is there a different approach to create an averaging window for my Euler angles samples?
**
Regards
Shukri
Comments
You cannot touch the sampling rates for sensor fusion.
SAMPLING RATES FOR THE SENSORS ARE FIXED FOR SENSOR FUSION. ALL SENSOR FUSION OUTPUTS ARE 100HZ AS PER BOSCH.
If you want to downsample, you have to post-process using our tools (such as a counter or averager).
Thank you for your response.
Using the default sampling rates for sensor fusion, I've attempted to post-process the data using a low pass filter (averager) following the API's docs as shown below
but I stopped receiving any values on my app's stream.
Is there anything wrong or missing on my usage of the low pass filter?
Why did my stream stop showing values after applying the filter?