sign problem with gravity

I made a log with gentle rotations will recording gravity an quaternion.
Then I tried to check the consistency of both information. With matamotion R oriented as show in tutorial (https://mbientlab.com/tutorials/Orientation.html ) the z value is positive. I expected it to be negative.
Then I calculate the gravity at every time by two ways
- rotation of unit vertical downward with quaternion
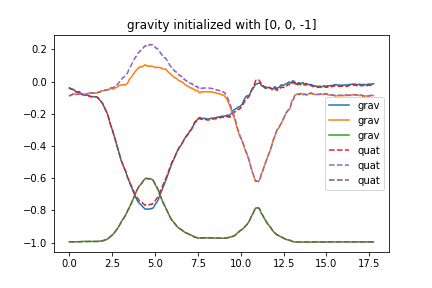
rotation of initial gravity measurement with quaternion
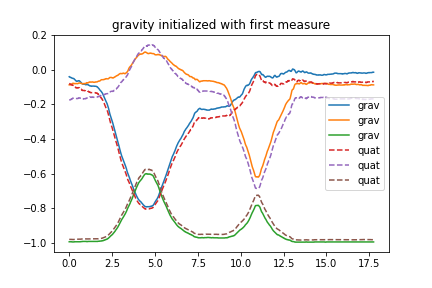
(to obtain right sign for x and y I needed to change sign of the z measured value
On both figures order is "x y z". grav are the measurements and quat are teh values computed with qauternions
So what is the reasaon for the sign convention ?
Comments
That Orientation is for acc and gyro, not for sensor fusion. Sensor fusion has its own orientation. I might post more about this in the tutorial at another time.
https://mbientlab.com/tutorials/Orientation.html is the BMI160 orientation, NOT SENSOR FUSION.