sensor_fusion_reset_orientation

Hi,
I am having issues with the API Function: mbl_mw_sensor_fusion_reset_orientation.
According to the documentation this function should reset the default orientation of the board. This works in NDOF mode and is not affected by the sensor fusion on or off.
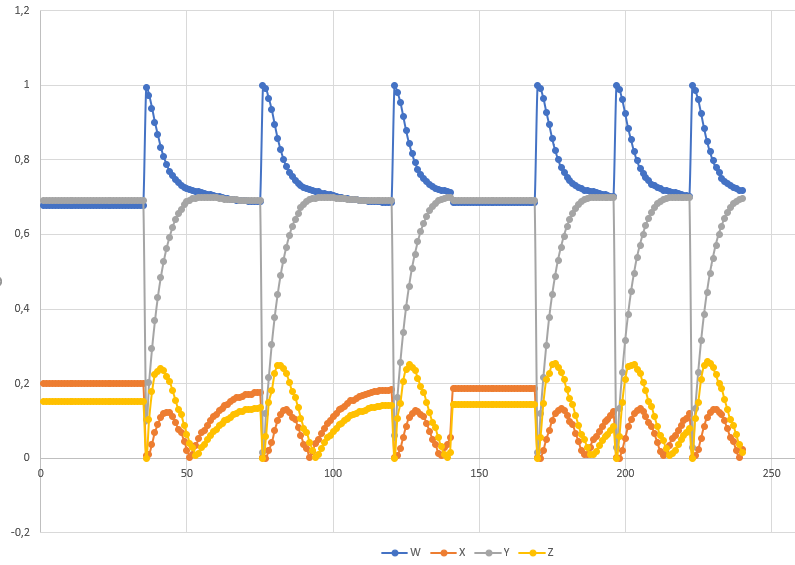
So I am streaming quaternions from MMR sensors to a raspberry pi and when I run this command the sensor resets the quaternions to x=0,y=0,z=0,w=1 as intended. However, data immediately runs back to the original orientation.
Shouldn't it stay at 0,0,0,1 and only change when I am moving the sensors or do I missunderstand the command?
Thanks
Alex
Comments
The NDoF mode calculates absolute orientation from accelerometer, gyro, and magnetometer.
Because the mag is used, right after you reset, the magnetometer kicks back on and get the absolute orientation (as a compass).
As such, the output goes right back into the actual orientation value.
You can't use that to tare in modes where the mag is on.
Okay I see. That makes a lot of sense. I was just confused by the documentation which mentions
thanks
I'll check on that. Thanks
So this should work as atonino described using IMUPLUS mode, correct? I was having the same issue but I'm pretty sure I tried in both modes with the same result. I will try again and post back