SensorFusion Calibration

Hello Eric,
We are streaming data through the C# SDK with SensorFusion. However, it seems that the values of the Quaternium are not consistent, even if i always start from the same position, i.e., we get different values when doing the same motion (e.g. pitch or role). so i have a couple of questions:
- I saw that in the Android SDK you have some methods for calibration. Do you have something similar for the C# SDK ?
- I saw that in last firmware update (1.4.1) you "Exposed sensor fusion calibration state" - can you please elaborate more about what is this state and how do i use it? Is it part of SDK ?
- should i assume that the sensrFusion is calibrated?
- what is the "best practice" to do in order to get accurate constant streaming in each connection?
Thanks,
Comments
.So Can you please explain how to calibrate the sensor if i use the c# sdk? What are my options here?
2. Is the android sdk doing calibration or it is just reading status?
Watch the sensor fusion calibration video linked in the documentation:
https://mbientlab.com/androiddocs/latest/sensor_fusion.html#calibration
Hi,
1. The video describes the calibration of **BNO055 **sensor, which is not the case of MetaMotion sensor R according to your data sheet (which is BMI160 / BMM150 ). Do I miss something?
2. According to BNO55 documentation, the calibration should be performed "after every ‘Power on Reset". Can you explain what it I mean in Metawaer terms? should we do the calibration described in the movie after each "Initialize -teardown" session in C# SDK, or just once for all life cycle of the sensor? i.e., if i connect to sensor use the SensorFusion, and then disconnect, should i do the calibration BEFORE each connection ? . If not, when should I start the calibration? how do I know that the calibration was OK with C# SDK ? i understand this is not supported, but are you planning to do this in next SDK version ?
4. The video describes how the technician works with Botch software in the sensor level using botch's designated service tools. Do you expect that users should do the calibrations with these tools by themselves? How we can do that as we bought SW Module and not HW component? and if yes, a can you please elaborate more about this process rather a youTube video?
It means exactly as stated; when the device is powered on, start the sensor fusion algorithm then calibrate the sensors before you collect the data.
Calibration state will be added.
Hi,
1.OK
2."when the device is powered on" -> do you mean at the first time when Unboxing? how do i start the " the sensor algorithm in C#?
3. Another question - In my app, when starting i want to create a "reference" to some absolute orientation (e.g. 0,0,0.7,0.7), but the data coming from Quaternion is depend on the initial physical orientation if the sensor. How can i make an "offset" to achieve this orientation? e,g, when user start with (0,0,-0.8) i want it to be offset into be aligned with (0,0,0.7,0.7).
No, it means exactly as stated. The second quote is a typo, should be "sensor fusion algorithm" and has been corrected in my previous post.
Post unrelated questions in their own thread.
You do it if the calibration state is not at high accuracy.
Yes but once it is high accuracy , it can be unreliable again after some time ?
Yes, when the device powers on. You should also check the calibration state every time you start sensor fusion.
Hello,
can you show the C# code of the calibration process represented in 5.2 section as you did for c++ and phyton?
I try to write code that represents the steps , however, I need help to write the correct code blocks.
Currently, my code looks like this :
My questions:
1. For example, in step 3 you wrote: " Then the App should stream values for the CalibrationState -> MblMwCalibrationState."
--- do you mean " sensorFusion.ReadCalibrationStateAsync()" method? Cause This method just returns value and not streams
-- Is it Calibrate like the following code? If yes should I do the 45 degrees thing during this stream? (cause you wrote to do this with data stream)
2.. Then in step 4 you wrote: " While the App is streaming values, …. until you get high accuracy on Calibration state"
I assume you mean to do the 45 degrees thing during data stream( not state stream) ?
--how I can get the streaming status while streaming data?
3.should I do the "8 movements" to calibrate the magnetometer? (cause you say just to do the 45 degrees)
The calibration process is directly implemented in the C# SDK.
https://mbientlab.com/csdocs/1/sensor_fusion.html#calibration
Refer to the previously linked C# documentation
No where in the calibration tutorial is a data stream mentioned.
The instruction says to start with the 45 degree rotations not only do those rotations, though it can be worded better.
Refer to the previously linked C# documentation
Thanks,
1.Can you please confirm that this code is calibrating the sensors and write the calibration data to the board?
Looks fine.
Try rewriting the calibration data.
Here is the code i wrote . note that i put in a comment the macro cause i did it allready once.
But i get this still :
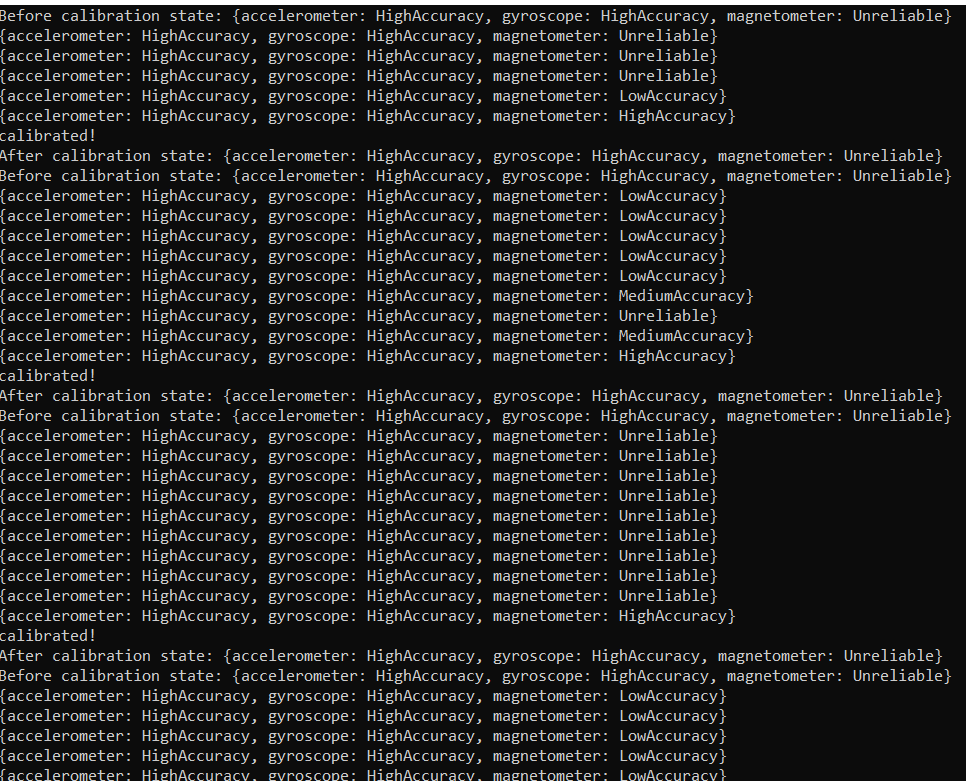
is there any answer here?
Separate the macro setup from the calibration process. Stop sensor fusion first then write the calibration macro.
You can find the definition with a simple internet query:
https://lmgtfy.com/?q=power+cycle