Adding a external TI LMP91000 and LM4120 circuit to MetaMotionR via I2C

I would like to know after connecting the custom build board with Texas Instrument analog front-end chip (LMP91000) and a reference voltage controller (LM4120) to metaMotionR pin 3, 5, 6, 7, and 8 (See diagram). How can I
1. make MetaMotionR supply the Regulated 3V output from pin 7 to the peripheral board.
2. Read the values from pin 8?
3. Do I need to change the code in the firmware of your BLE controller or just the code in MetaBase App or do something else?
datasheet of LMP91000, LM4120, and schematic diagram of the peripheral boad are attached
diagram = 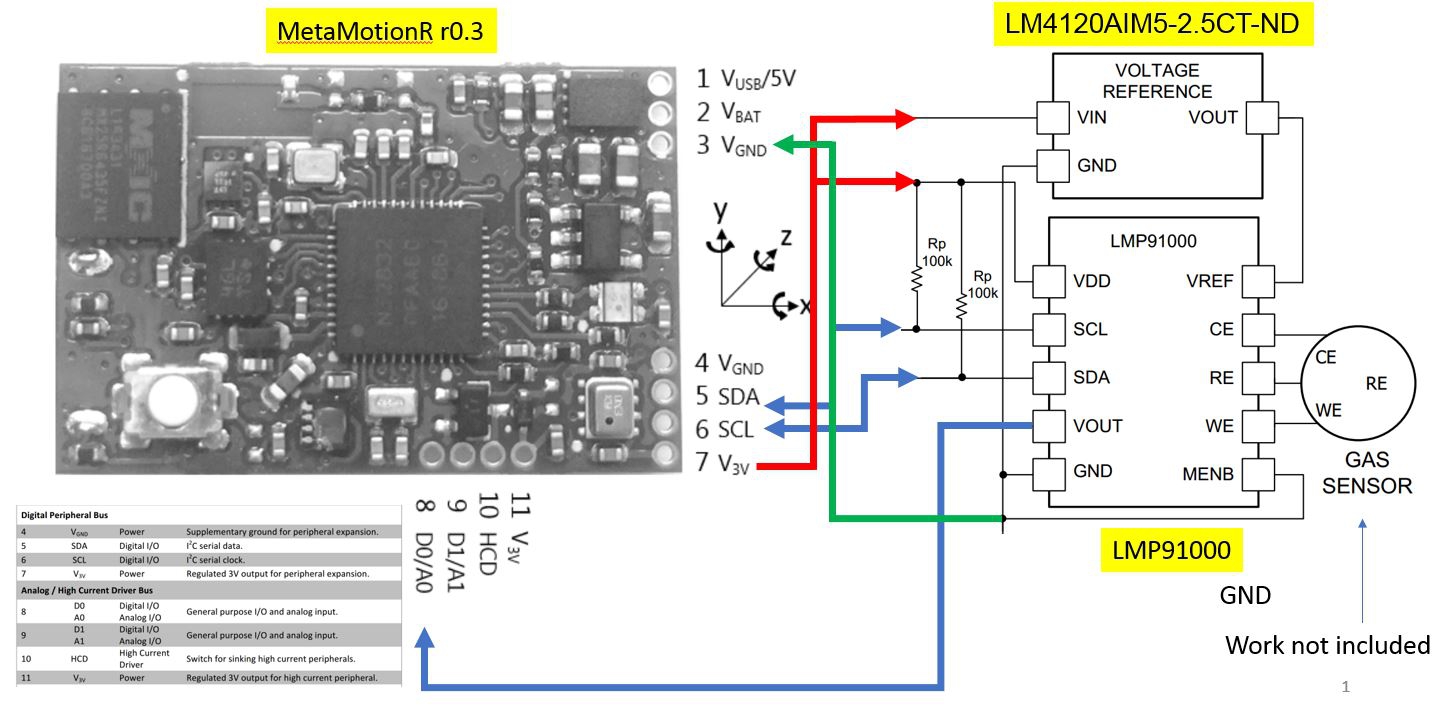
Comments
It should supply the voltage once the board is powered
Use the APIs to read the gpio voltages
You will need to write your own app
@Eric Thanks! Could I modify the code from your MetaBase App and use it to read from pin 8?
@Eric do I need to use gpio.pin((byte) 7).setOutput() to instruct MetaMotionR board to supply me with a 3V output to my peripheral board?
There is no gpio pin 7. The pin 7 in your diagram is explained in the product specification, sections 2.3 and 2.4.
https://mbientlab.com/documents/MetaMotionR-PS3.pdf
thanks! So I can take it board pin 7 is always alive with 3V for powering any peripheral devices?
Quoting myself from last month...
@Eric I use the following example codes to read in register values from the bmp280 sensor on my MetaMotion R board but i keep getting null result. it should be 0x58 right?
// Reads the ID register (address 0xd0) from the BMP280 barometer (rpro, cpro, motion)
serialPassthrough.readI2cAsync((byte) 0x77, (byte) 0xd0, (byte) 1)
.continueWith(new Continuation<byte[], Void>() {
@Override
public Void then(Task<byte[]> task) throws Exception {
Log.i("MainActivity", String.format("bmp280 id = %d", task.getResult()));
return null;
}
});
05-30 12:34:53.117 10699-10710/com.mbientlab.metawear.tutorial.starter I/MainActivity: bmp280 id = null
Please format your code.
Yes, it should be 0x58. Check what
Exceptionthe task is returning if the result is null.