Calibration of multiple sensors

Hi, I recently purchased two MetaMotion R+ sensors. I've calibrated both of them with the python script from github several times and I keep getting a offset in Yaw/heading at around 180 degrees. I followed the video instructions. I use the NDOF mode. I get the offset in both the MetaBase app and in the Python sdk. I expected an offset <5 degrees, since the sensors are both the same hardware,firmware and new. I plan to use quaternion, but I find the euler angles easier to understand. Have anyone an idea how I can fix this? Thank you very much.
Comments
@thorssonmax,
Please provide actual data, photos, and reproducible steps to the issue.
In one test I just made of euler angles, just collected from the Metabase app in Windows I got these values:

The sensor is laying like this:
EC:09:B8:F7:F1:B2 <-C1
pitch (deg):-1.208 roll (deg):-7.311 yaw (deg):359.999 heading (deg)359.999
C3:F5:1B:7B:13:35 <-C2
pitch (deg):106.539 roll (deg):16.171 yaw (deg):96.344 heading (deg):96.344
This is the HW and FW:
MetaWearClient, EC:09:B8:F7:F1:B2: {'model': '5', 'hardware': '0.3', 'manufacturer': 'MbientLab Inc', 'serial': '049764', 'firmware': '1.4.4'}
MetaWearClient, C3:F5:1B:7B:13:35: {'model': '5', 'hardware': '0.3', 'manufacturer': 'MbientLab Inc', 'serial': '03145C', 'firmware': '1.4.4'}
I see the similar behavior, if I set the sensors in IMUPlus mode through the Python SDK and after calibration it just varies.
example values IMUplus, after a new calibration.
['{heading', ':', '183.718,', 'pitch', ':', '0.136,', 'roll', ':', '-2.422,', 'yaw', ':', '183.718}']
['{heading', ':', '289.527,', 'pitch', ':', '3.772,', 'roll', ':', '85.290,', 'yaw', ':', '289.527}']
Thank you for great support.
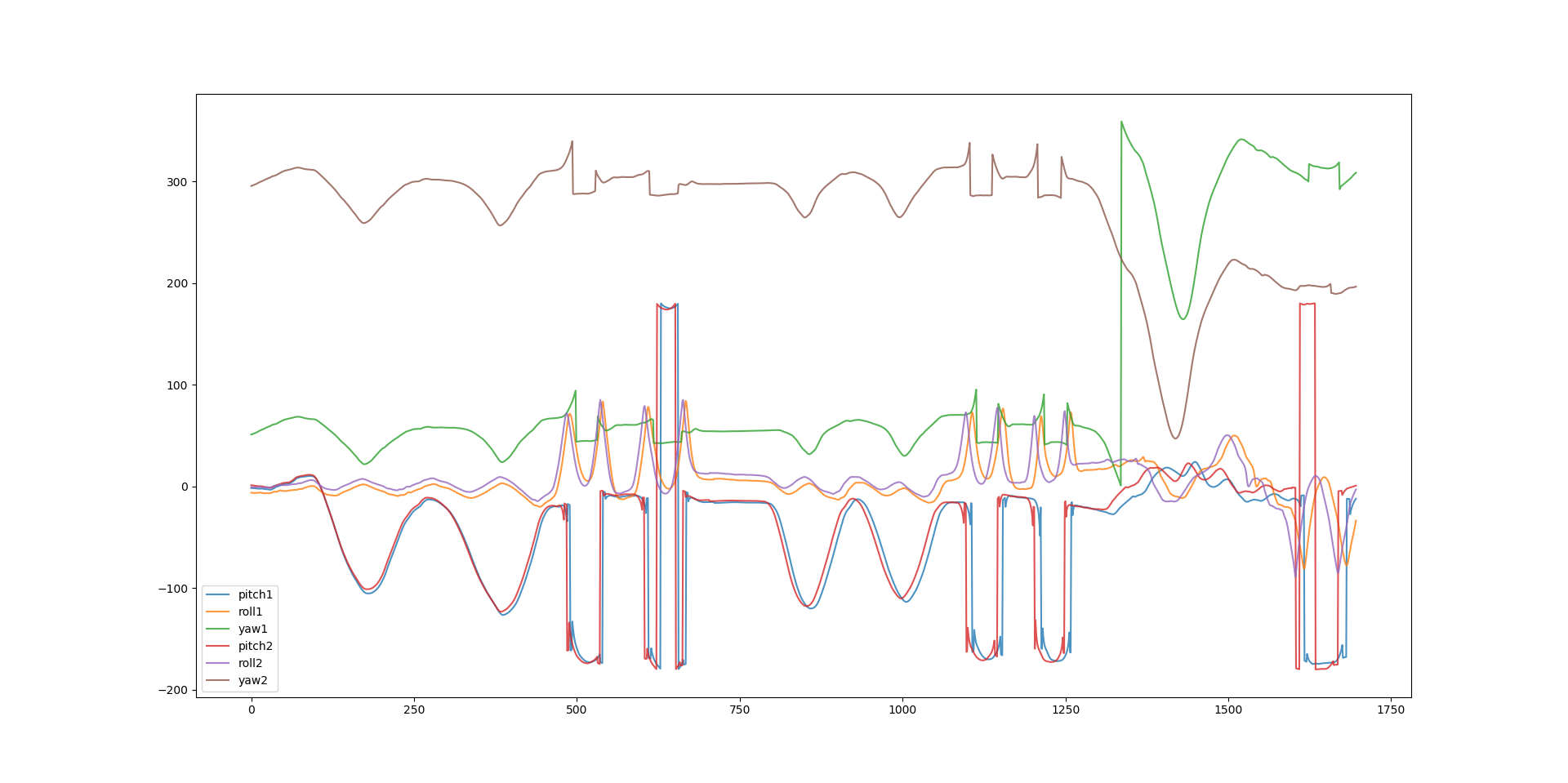
After sampling a long time and tried various of movements it seems like its in horizontal plane its most problems, here the yaw/heading is sometimes correct when devices are in the same position and sometimes only when they are pointing in the opposite direction.Here is one plot that displays the yaw/heading offset. it sometimes bounces back. this also affects the quaternions.
Do the other MetaMotion boards you have exhibit the same behavior?
It might be better to compute relative orientation from the values instead of using the values as is.
For the moment I only have these two working. I wait for one more to arrive next week.
I believe it's a strange behavior. I believe it's only one of the boards that does this "jumping" in changing orientation suddenly. If they are synced, like in the end of the plot, there is still an offset. Is there anything else I can do, to improve the accuracy?
I thought you had other MMR boards that you had previously purchased?
As I previously stated, compute relative orientation.