Set current device position as start position

Hello,
this question might sound wreid but im just starting with this device (MetaMotion R) and also Sensor Fusion data.
I am reading roll from device by using this code:
sensorFusion.eulerAngles().addRouteAsync(source -> source.limit(33).stream((data, env) -> {
Log.d("TEST", "" + data.value(EulerAngles.class).roll());
}
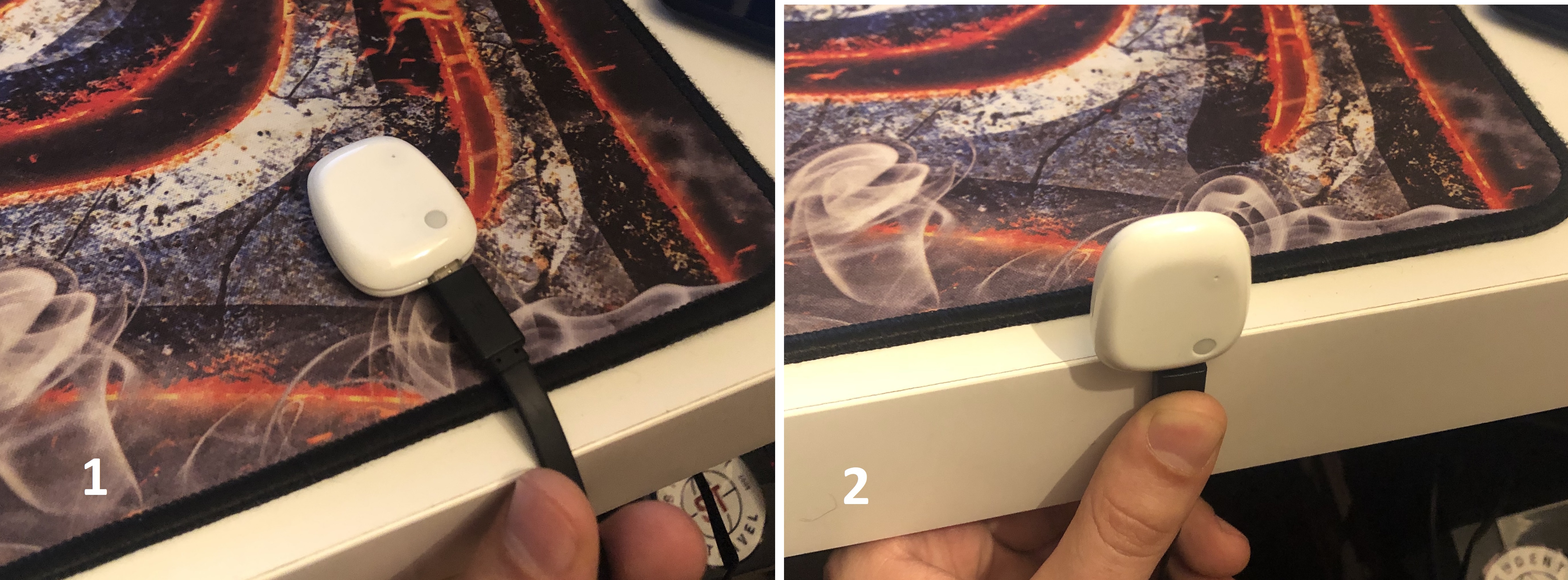
My problem is that device is giving roll readings near 0 when it is placed like on image 1, but i need it to be 0 when it is in position 2 (now it is 90 Degrees ).
Do i have to calibrate it somehow or i have to map readings to fulfill my needs?
Comments
The device has a fixed internal orientation that you cannot change. You would have to adjust the values yourself in software (post-process after you get the data from the sensor and adjust to your liking).