Sensor Fusion drift in Roll and Pitch

Hi
We did some testing yesterday and experienced drift from our MMCs.
It was in jumping with skis and the in-run is rough and there are a lot of mini vibrations.
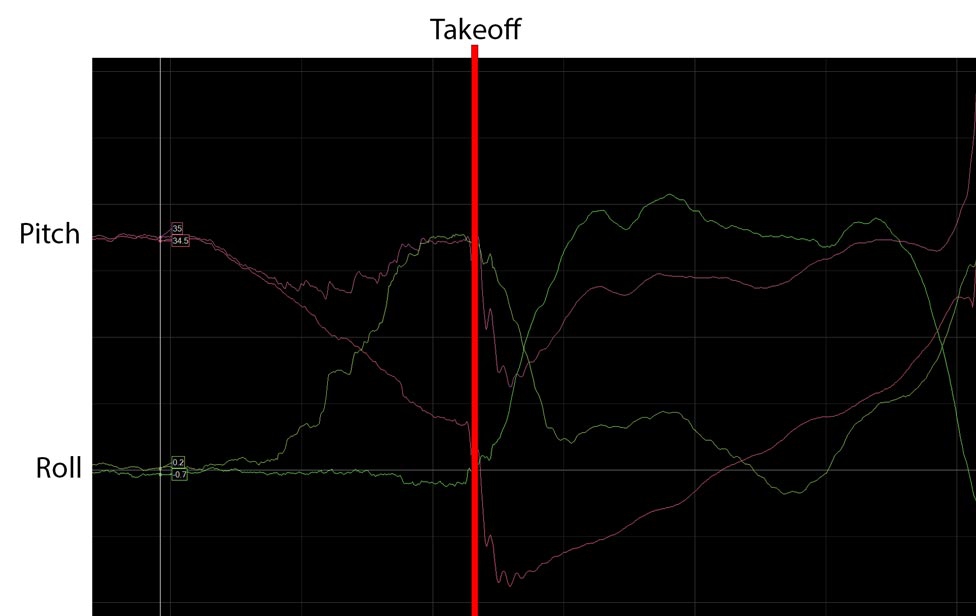
It starts well at the beginning, but with higher speeds in the in-run (therefore more vibrations) it starts to drift sooner or later. After the takeoff it stops drifting and a little later after the landing the fusion recovers again. In theory roll and pitch should stay about the same (+/- 2-3°) up to the takeoff.
This or similar behavior was measured on all 10 jumps, but some few single sensors seemed to stay correct.
Data gets logged; euler angle and linear accel
MMC: 0.1&0.2, 1.5.0, MN 6
Host is Metahub
Fusion Model was IMU_PLUS and sensors with 16g and 2000dps
In the attached files, the shown sequence starts @09:56:14
In the forum I found this in an older thread, which seems similar to me:
https://mbientlab.com/community/discussion/2240/sensor-fusion-makes-lots-of-noice#latest
My questions are now:
1.
Would you agree that vibrations is the cause of this drift?
If yes: Is there a way to improve my recordings with metahub settings which I could adjust?
2.
In this other thread there is a discussion about a filter mode (1/2 & 1/4) for the BMI160 directly after accel and gyro and before Fusion. e.g. gyroBMI160.filterMode = .OSR4
Is this something that would maybe help me here too, or do a test with it. And is it usable without writing a complete custom app?
Thanks in advance
Goam
Comments
1.
Sensordrift does not happen without the vibrations. Just wanted to ask if you could think of anything else that would cause it. We´re using IMU_PLUS so the magnetometer shouldn't be a problem?
2.
You are right. But I am having difficulties finding these filtermode properties for the BMI160 your colleague Eric mentioned in the link from my initial post (he only posted Swift there...)
`// Set accelerometer settings
if let accelerometerBMI160 = device.accelerometer as? MBLAccelerometerBMI160 {
accelerometerBMI160.fullScaleRange = .range8G
accelerometerBMI160.filterMode = .OSR4
}
// Set gyro settings
if let gyroBMI160 = device.gyro as? MBLGyroBMI160 {
gyroBMI160.fullScaleRange = .range1000
gyroBMI160.filterMode = .OSR4
}
// Set sensor fusion settings
device.sensorFusion?.mode = .nDoF
// Start the sensor fusion stream
device.sensorFusion?.eulerAngle.startNotificationsAsync { (obj, error) in
// ... use obj as needed ...
}.failure {
print($0)
}`