MMRL

Hi, can someone please clarify my doubts about the MMRL sensor:
1 - I understand that 100 Hz sensor fusion is hardcoded, is it possible to output both linear acc + quartenion using logging?
2 - To check if any data package was lost: is the best way to use the epoch portion of the time stamp?
3 - Does the MMRL has the same "always on" function as MMR (in my application the user does not have physical access to the sensor, so this is critical).
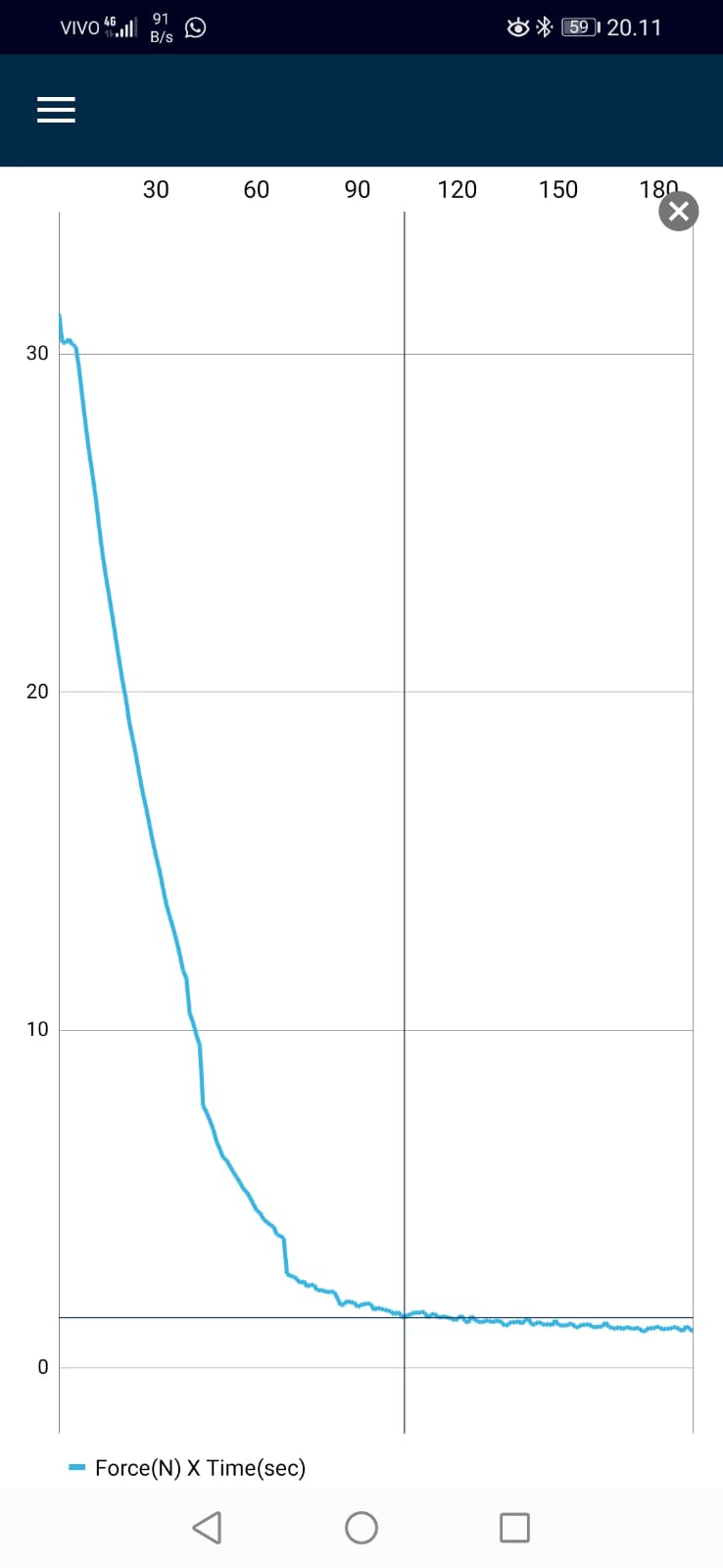
4 - As you can see in the picture, sensor fusion takes about 2 seconds to get rid of gravity and have a stable value (in the graph resultant acceleration was calculated and then multiplied by the weight of the implement to arrive at force). Is there any way to speed this up (i.e. keep the sensor fusion active on the background, so that when the user uses the streaming the data is already correct?)
5 - Has anyone tested the Android API and checked how fast can the sensor output the linear acc data (100Hz, about 8 seconds) using logging? I'm asking this to check if it is feasible to use logging in a use case that the user wants to see the results right away (within a few seconds).
Thank you in advance!
Br,
Pedro.
Comments
1 - I understand that 100 Hz sensor fusion is hardcoded, is it possible to output both linear acc + quartenion using logging? Kind of but it is not official supported. You can try quaternion at 100Hz and acc at 15/20Hz (no more).
2 - To check if any data package was lost: is the best way to use the epoch portion of the time stamp? Yes there is a packed counter option but I don't recommend it because you are already pushing the BLE link so adding more data will just add to potential data packet loss risk
3 - Does the MMRL has the same "always on" function as MMR (in my application the user does not have physical access to the sensor, so this is critical). Yes
4 - As you can see in the picture, sensor fusion takes about 2 seconds to get rid of gravity and have a stable value (in the graph resultant acceleration was calculated and then multiplied by the weight of the implement to arrive at force). Is there any way to speed this up (i.e. keep the sensor fusion active on the background, so that when the user uses the streaming the data is already correct?) No, this is how long it takes to calibrate and it is not avoidable, just do it as early as possible. We use the BOSCH sensor fusion library and it is closed source (we don't have access to it) so we can't change anything
5 - Has anyone tested the Android API and checked how fast can the sensor output the linear acc data (100Hz, about 8 seconds) using logging? I'm asking this to check if it is feasible to use logging in a use case that the user wants to see the results right away (within a few seconds). I am not sure I understand this questions but based on what I understand I don't think this is a solution.
Thank you for the reply!