Large offset in data

Dear community,
While using our sensors to measure movement along the Vertical axis (yaw), we experience an offset from 0 to 80 deg. This is both observable when data logging at the standard 100Hz Euler Angles (Figure 1 Top), and when data logging at a selected 200Hz Acc + 200Hz Gyr + 25 Hz Mag (Figure 1 Bottom).
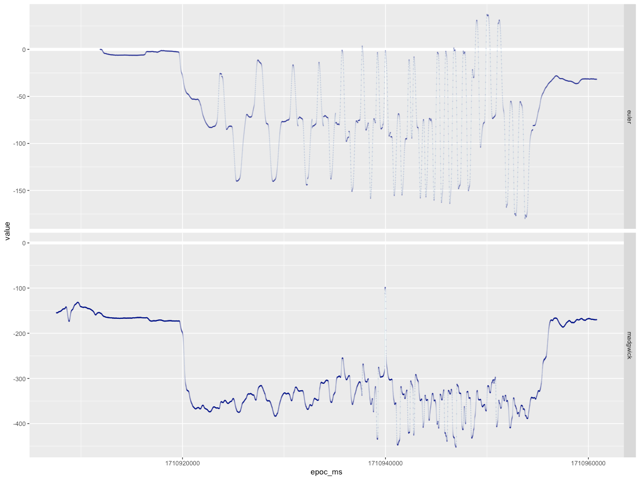
The attached pdf "pure euler" shows this offset in Yaw much clearer when recording with Euler 100Hz.
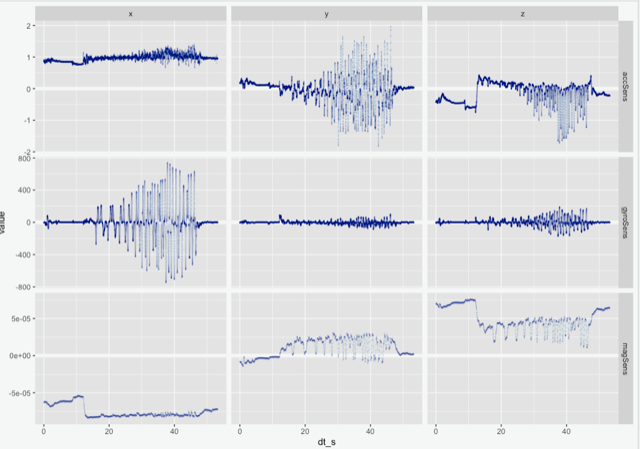
More specifically in Figure 2 below, the raw data logged at 200Hz may indicate that the magnetic sensors may be distorting the element (Z-MagSEns).
Does anybody have any tips on how to correct this offset? Or are there other inviduals also experiencing a large offset and have advice on how to proceed differently?
Thank you in advance,
Adam.
Comments
Looks like either gimbal lock or magnetic interference.