MetaWearCPRO Magnetometer axis alignment

Hi,
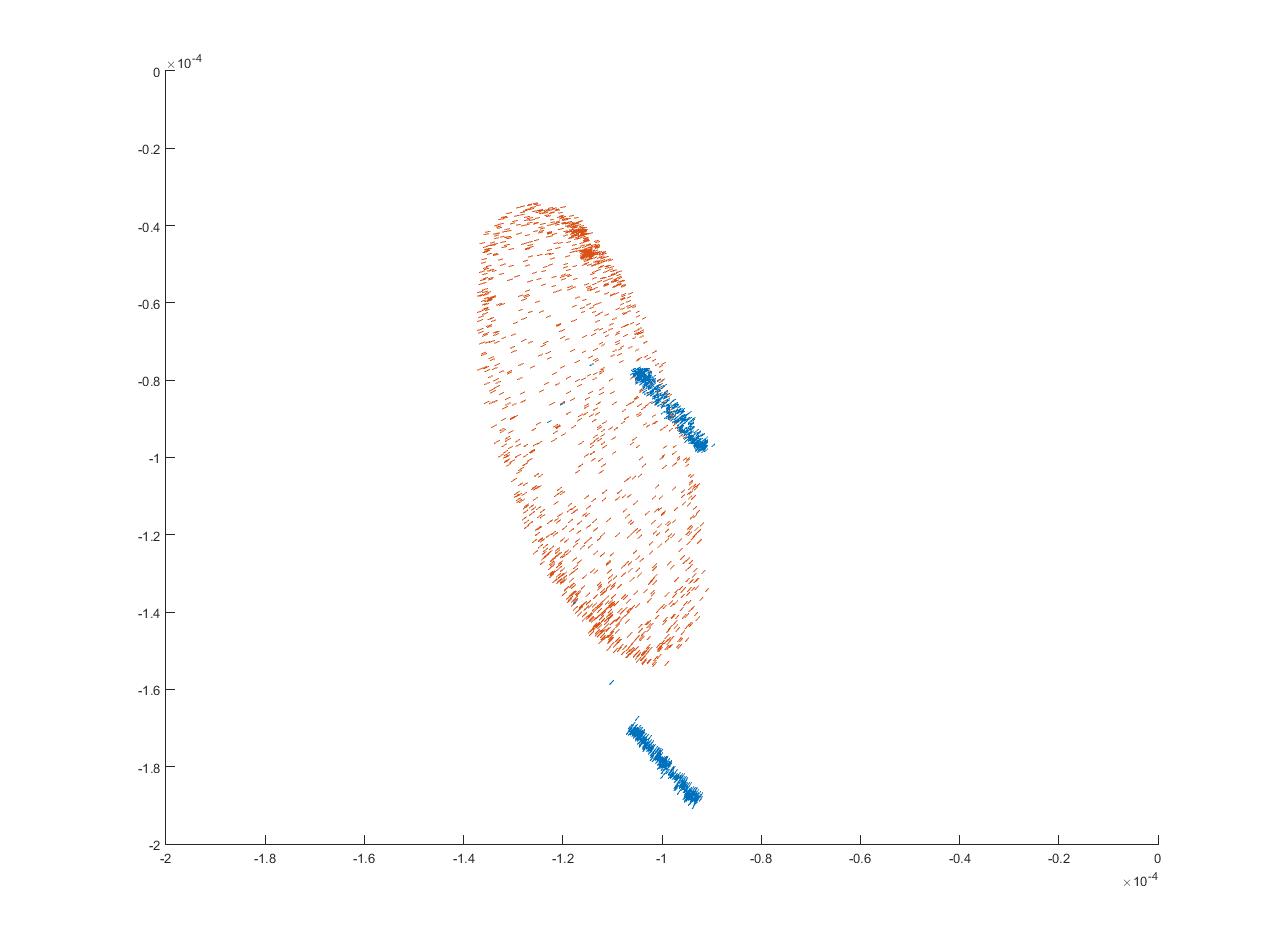
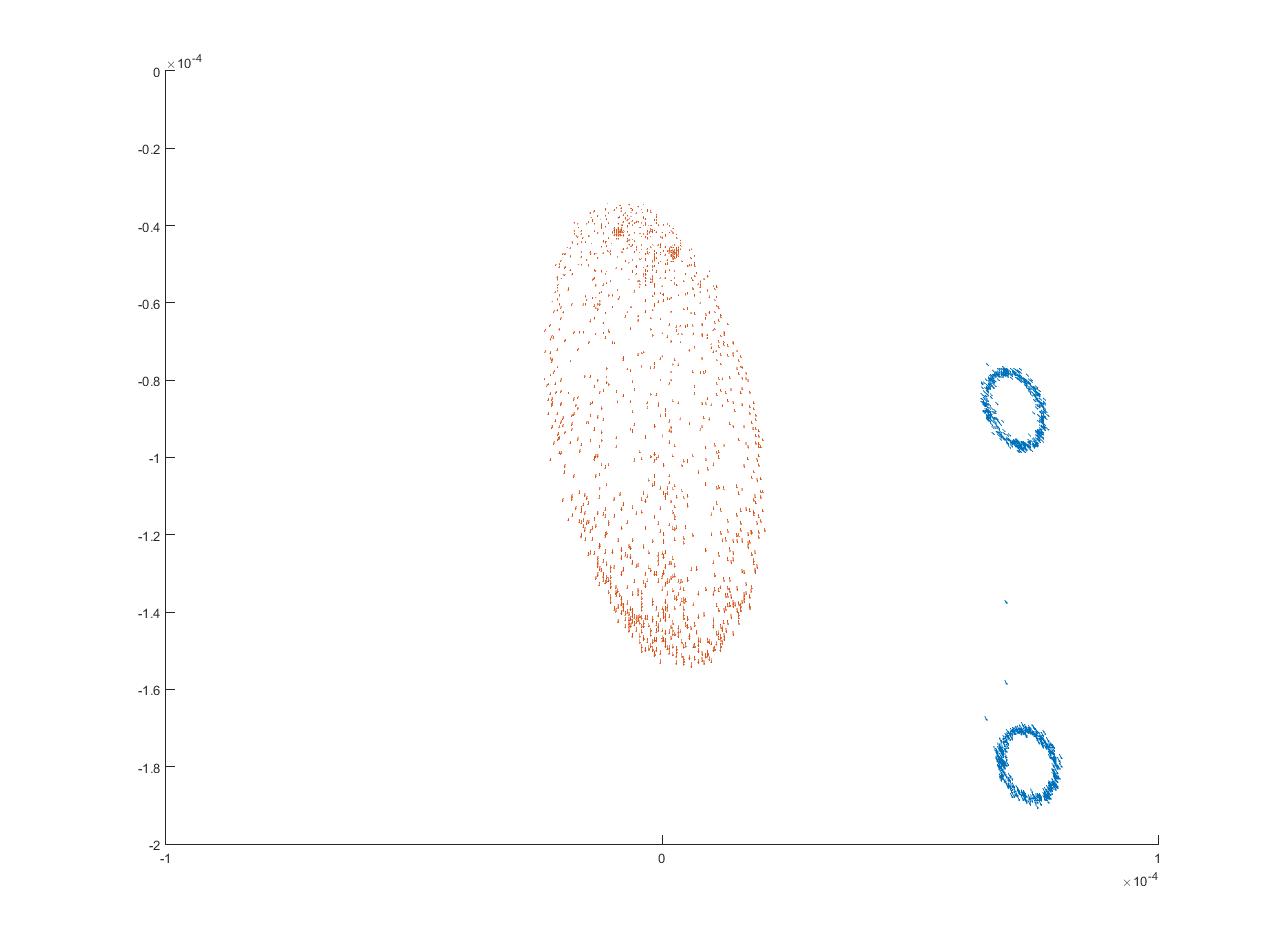
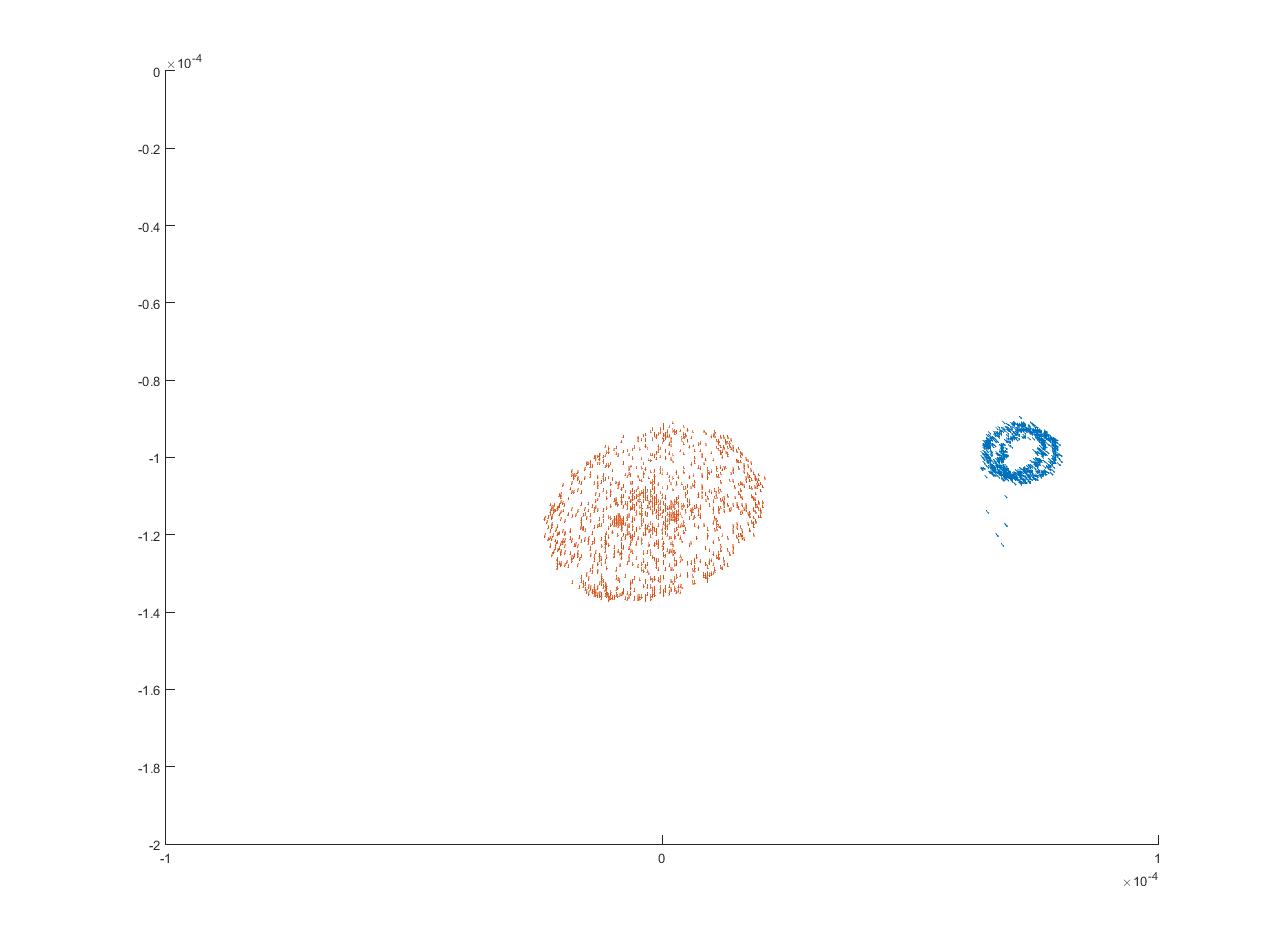
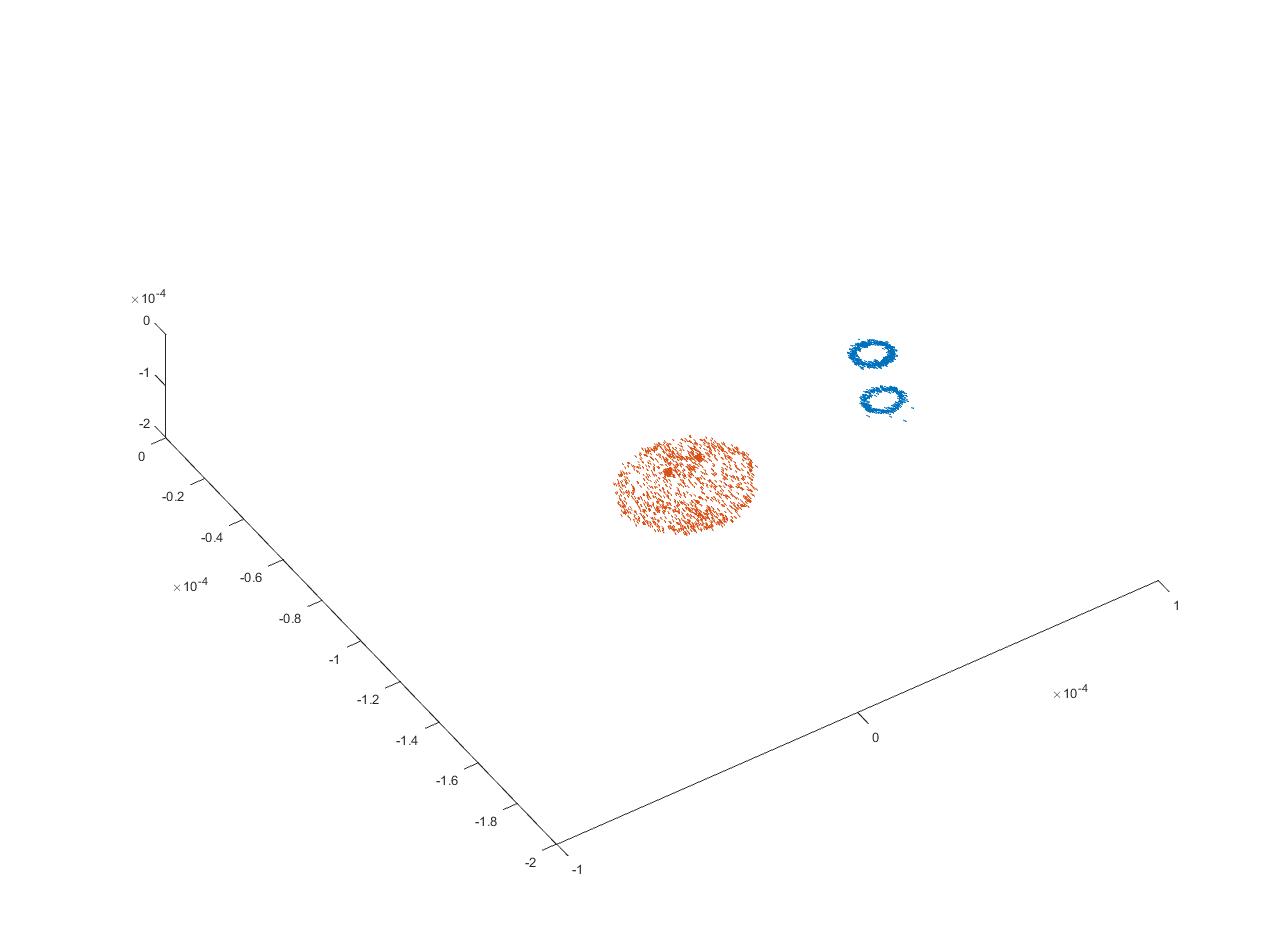
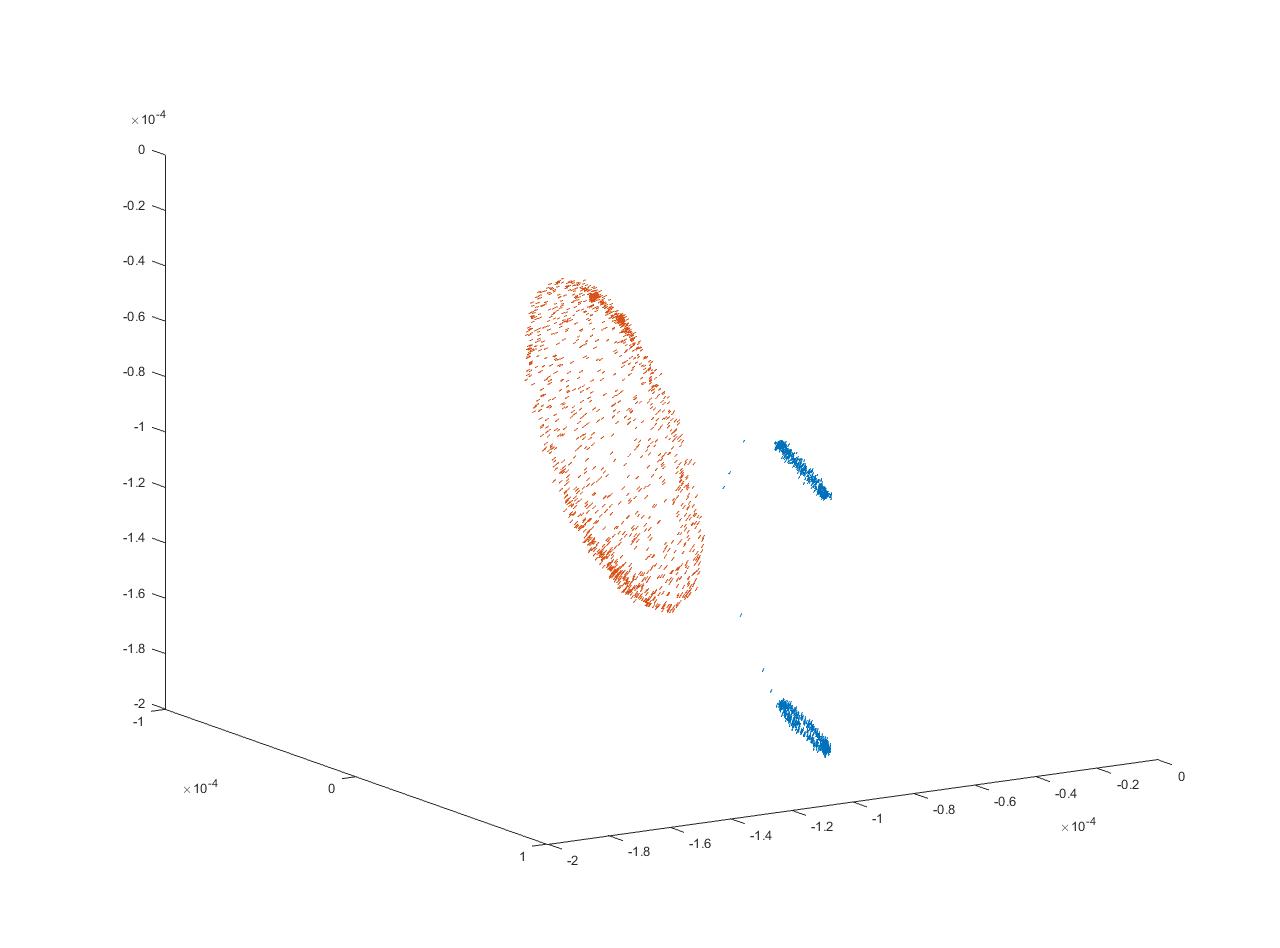
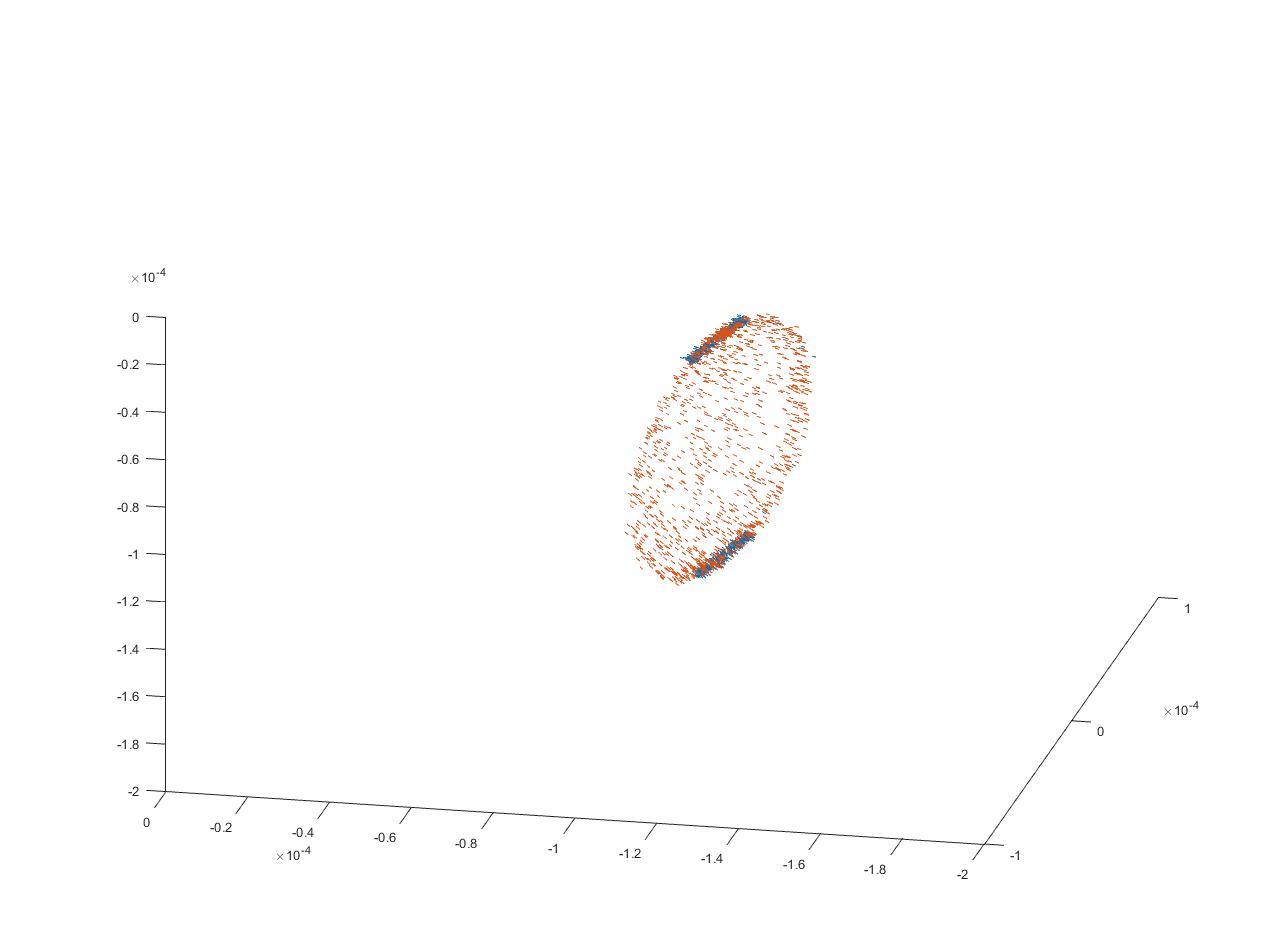
I have purchased a MetaWearCPRO and I have a couple of questions regarding the magnetometer module. I have performed two periods of data collection, one where the module is rotated in all axis, and one where it is rotated around the z-axis (with the board placed flat and then turned up side down). I have uploaded images of the plots here:
http://www.biomechatronicslab.co.uk/images/YZaxisview.jpg
{kind=link}
http://www.biomechatronicslab.co.uk/images/XZaxisview.jpg
{kind=link}
http://www.biomechatronicslab.co.uk/images/XYaxisview.jpg
{kind=link}
http://www.biomechatronicslab.co.uk/images/view6.jpg
{kind=link}
http://www.biomechatronicslab.co.uk/images/view5.jpg
{kind=link}
http://www.biomechatronicslab.co.uk/images/view4.jpg
{kind=link}
My first question is why would the axis of the data not appear to align with the world axis? I have calibrated other magnetometers using the same method in this location and have not seen this before, the Z component of the data normally remains constant when revolving around the z-axis. There are no components that stand out as being misaligned to the board, and I don’t see any indication in the datasheet for the BMM150 (Section 8.2).
My second question is about the scaling, I was expecting the tests to produce a sphere, not an ellipsoid. I see the magnetic range of the module is different in the z-axis on the datasheet (±1300μT (x,y-axis) ±2500μT (z-axis)), but it appears that all three of the rotated axis are scaled differently (shown in view_5 and view_6). Are there any features that might be causing this?
Regards,
Sam
Comments