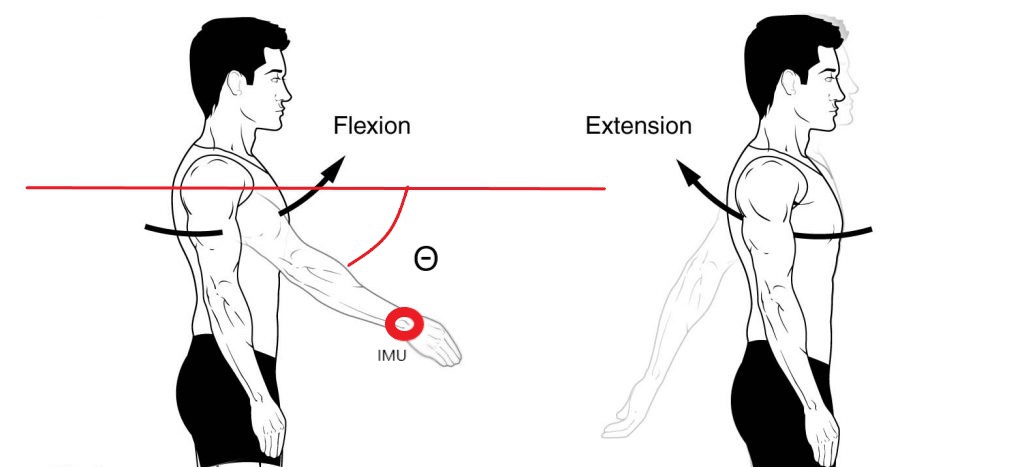
Theta angle of arm flexion/extension

Is it possible to measure theta angle of flexion extension as you can see on the image without affected by abduction/circumduction?
First of all i'm using quaternions for all of my operations to avoid gimbal lock, and then i convert to euler angles to display Θ angle(of flexion/extension) to the user. I also set an initial quaternion (that can be my inertial coordinate frame) and compare all quaternions with initial. Last i get yaw, pitch, roll from result_q. If i don't make any other move except of flexion/extension i get the correct Θ. The problem occurs when i also rotate my wrist(circumduction). Then if the sensor is not in the initial position i get wrong angles.
result_q = Conj(initial) * q
Any ideas?
Comments
This is why we made www.miotherapy.com.