Can Linear Acceleration stream faster than 25hz in IMU_Plus mode?

Board Information
Hardware version [0.3]
Firmware version [1.4.5]
Model number [5]
Host Device information
Device Model [Raspberry Pi 3 B+]
OS Version [Raspbian GNU/Linux 9 (stretch) ]
Description
I would like to stream Linear Acceleration at 100hz, however, I am constantly getting ~ 25Hz or less.
I am using IMU_Plus as my fusion mode. My raw results, and code is listed below
Streaming Raw Acceleration Data has no problem with sending data at 100Hz.
Thank you kindly,
- John
Code
from mbientlab.metawear import MetaWear, libmetawear, parse_value
from mbientlab.metawear.cbindings import SensorFusionData, SensorFusionMode, FnVoid_VoidP_DataP
from mbientlab.warble import WarbleException
from threading import Event
import sys
from time import time, sleep, localtime
import os
def timeString():
result = localtime()
year = str(result.tm_year)
month = str(result.tm_mon)
day = str(result.tm_mday)
hour = str(result.tm_hour)
min = str(result.tm_min)
sec = str(result.tm_sec)
if int(sec) < 10:
sec = "0" + str(sec)
if int(min) < 10:
min = "0" + str(min)
if int(hour) < 10:
hour = "0" + str(hour)
if int(day) < 10:
day = "0" + str(day)
if int(month) < 10:
month = "0" + str(month)
time_string = (year + ("_") + month + ("_") + day + '-' + hour + ("_") + min + ("_") + sec)
return time_string
def create_lin_acc_file():
### Create Folder + File for collected data
path = "./CollectedData/Run_" + timeString()
access_rights = 0o755
try:
os.mkdir(path, access_rights)
except OSError:
print("Failed to make %s Directory" % path)
else:
print("Successfully created the directory %s " % path)
file_name_root = path
file_name_end = str(time()) + ".txt"
linear_acc_file_name = file_name_root + "/Linear_Acc" + file_name_end
linear_acc_file = open(linear_acc_file_name, 'a')
return linear_acc_file
def handle_Linear_Acc(ctx, data):
linear_acc = parse_value(data)
time = data.contents.epoch
xval = linear_acc.x
yval = linear_acc.y
zval = linear_acc.z
#write_string = str(("%d, %d, %d, %d\n" % (time(), xval, yval, zval)))
write_string = str(str(time()) + ", " + repr(xval) + ", " + repr(yval) + ", " + repr(zval) + '\n')
linear_acc_file.write(write_string)
#print(data)
print("Linear ACC Data : " + write_string)
count = 0
e = Event()
imu_id = 1
addr = 'FA:19:05:96:8B:E4'
if len(sys.argv) > 1:
addr = "FA:19:05:96:8B:E4"
imu_id = 2
print(addr)
start_time = None
# Set what type of data we want to collect from the fuser
linear_acc_data_source = SensorFusionData.LINEAR_ACC
max_connect_attempts = 5
linear_acc_file = None
try:
device = MetaWear(addr)
device.connect()
libmetawear.mbl_mw_settings_set_connection_parameters(device.board, 7.5, 7.5, 0, 6000)
sleep(1.5)
linear_acc_file = create_lin_acc_file()
except WarbleException as err:
print('reattempting after warble exception: {}'.format(err))
exit(1)
try:
# Set the type of fusion
libmetawear.mbl_mw_sensor_fusion_clear_enabled_mask(device.board)
libmetawear.mbl_mw_sensor_fusion_set_mode(device.board, SensorFusionMode.IMU_PLUS)
libmetawear.mbl_mw_sensor_fusion_write_config(device.board)
# Set up our Linear ACC and Quaternion processors
linear_acc_processor = libmetawear.mbl_mw_sensor_fusion_get_data_signal(device.board, linear_acc_data_source)
# Set up our handlers for our data
wrapped_handler_linear_acc = FnVoid_VoidP_DataP(handle_Linear_Acc)
# Subscribe to our data channels
libmetawear.mbl_mw_datasignal_subscribe(linear_acc_processor, None, wrapped_handler_linear_acc)
# Enable our data sources
libmetawear.mbl_mw_sensor_fusion_enable_data(device.board, linear_acc_data_source)
libmetawear.mbl_mw_sensor_fusion_start(device.board)
#e.wait()
# record data for 60 seconds
sleep(60)
except RuntimeError as err:
print(err)
finally:
libmetawear.mbl_mw_sensor_fusion_stop(device.board)
libmetawear.mbl_mw_sensor_fusion_clear_enabled_mask(device.board)
libmetawear.mbl_mw_datasignal_unsubscribe(linear_acc_processor)
libmetawear.mbl_mw_debug_disconnect(device.board)
Raw Results ( snippet)
Comments
It is 100Hz if you have nothing else streaming at the same time. Can you confirm this?
Also the default = 100Hz for Sensor fusion, so you should be naturally getting this.
Can you check your BLE? Are you using a dongle?
Can you please run our example scripts for sensor fusion and see if you get closer to 100Hz (don't run your code, run ours instead):
1. Use this as the base: https://github.com/mbientlab/MetaWear-SDK-Python/blob/master/examples/stream_acc.py
2. And replace the signal with a sensor fusion signal: https://github.com/mbientlab/MetaWear-SDK-Cpp/blob/master/test/test_sensor_fusion.py
Hi Laura,
Thank you for your time.
Of course, thank you for the suggestion.
Running the following script - https://github.com/mbientlab/MetaWear-SDK-Python/blob/master/examples/stream_acc.py
I am reliably getting ~1230 signals per 30 seconds (41 Hz)
When I replace the signal portion of the code with the configuration available here - https://github.com/mbientlab/MetaWear-SDK-Cpp/blob/master/test/test_sensor_fusion.py
I am fairly consistently receiving ~ 760 signals per 30 seconds (22 Hz)
These results are persistent through reboot of my Linux device(Raspberry Pi 3B+)
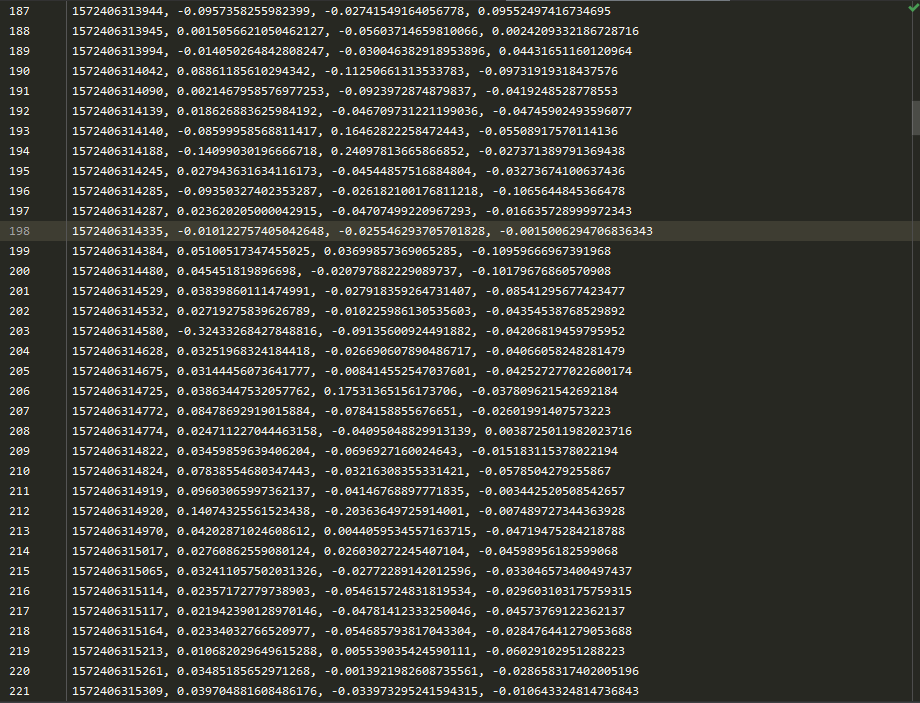
Here are two screenshots of the data, as well as the fusion signal code (created using the above links). I am curious if I am perhaps incorrectly implementing the sensor fusion configuration or callback function.
Thank you kindly
- John
Raw Accel
Linear Accel / Sensor Fusion, IMU_Plus Mode
Code
Oh Dear.
I reset the board using
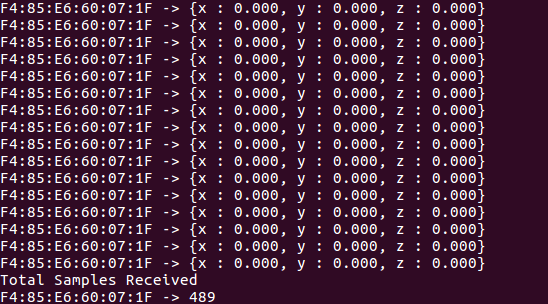
libmetawear.mbl_mw_debug_reset(s.device.board).Now, the linear accel data is reading much faster (100Hz!), however, all of the readings are zero. I will have to go back and ensure I am enabling the sensor fusion correctly.
Thank you for your assistance Laura.
Great news @JMoody.")
Perhaps the sensor was doing other things internally that were eating up bandwidth?
Glad it worked out
Hi @JMoody.
I tried using your code but I found a problem with the value are always 0 all along. Help me please.
Please follow the rules on posts: https://mbientlab.com/community/discussion/3167/how-to-report-an-issue#latest
Oh I see, Sorry for the bad manners.