Heading/yaw jumps with recording Euler Angles

Hi all
I am recording Euler angles with 2 Metamotion C sensors on an aluminum plate for testing and to make sure both sensors are about the same (angle and direction wise)
It all starts well (difference is under 1-2° and with custom housing etc to be expceted)
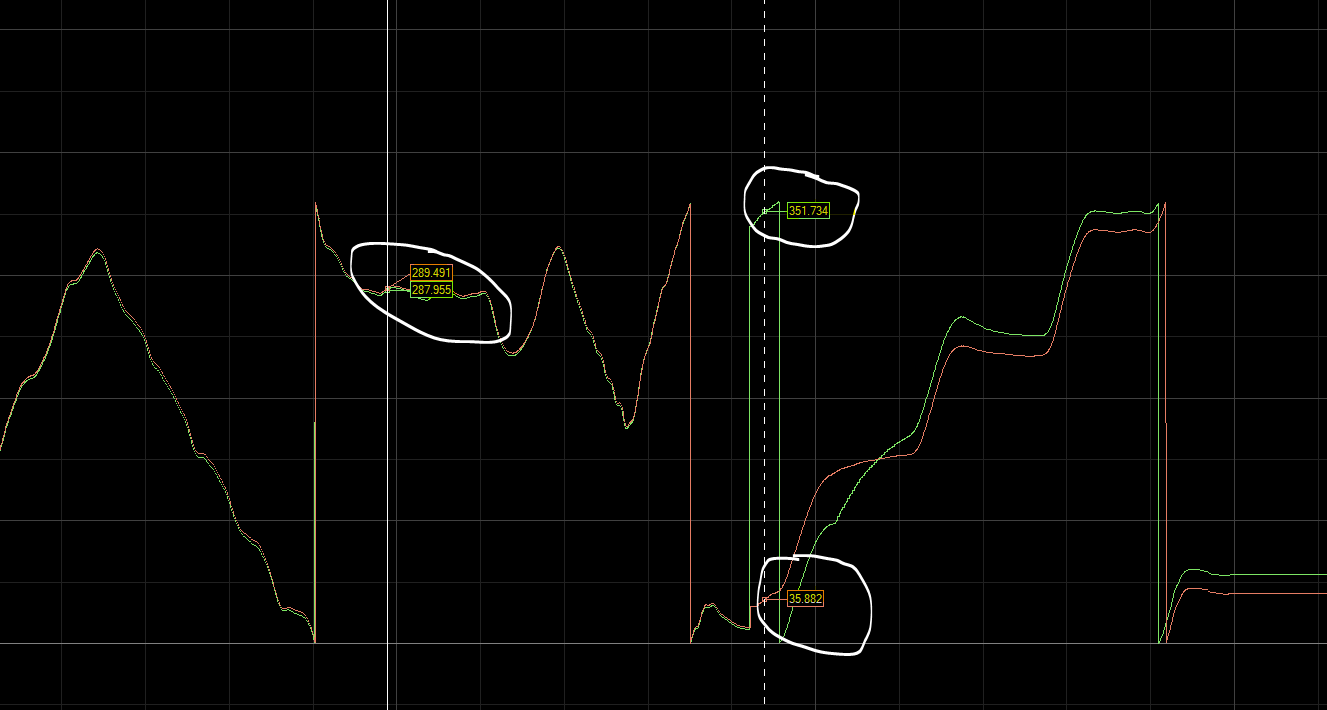
But at some point the heading/yaw always starts to jump. Later it goes closer together, but never gets as good as at the beginning of the recording. Roll and pitch are doing ok
Reading a little bit about these things I saw that heading can be jumpy...
Is this normal behavior from the sensor, or is there any way I can improve this?
Metamotion C
Mod Nr 6
Firmware 1.4.4
Hardware 0.1
Final usecase is analyzing in sports. here a small vid where we already tested in skicross mounted on skis.
also here on sec. 39 you can see a jump in the left ski.

Cheers
Goam
Comments
This looks like normal behavior.
There is an option for calibration: https://mbientlab.com/tutorials/Calibration.html
It could help.
How are you configuring the sensor fusion algorithm? Are you calibrating the boards?
It might also be better to compute relative orientation instead of using the absolute values.
All sensors are straight out of the box, no extra calibration and not using anything special/config other than your android/iOS apps. I have to keep it as simple as possible for the Athletes. this also applies to absolute values
when starting the recording everything is really exact and does not look like it needs calibration (difference below 0.5°). The heading/yaw jump comes after some time and a lot movement and it always looks similar to the picture above; a bigger jump followed by trying to get closer but never coming closer than 10-15°
@ calibration")
thanks for the link with the calibration. saw that already in the tutorials, but thats a magnitude above what I am able to do....
I guess I have to find someone who can do python...
The athletes don't need to do anything. You should have your own customized app that prepares the board and post processes the data.
It's possible the sensor data is being saturated from extreme motions i.e. some rotation occurs that is greater than 2000 degrees per second.
All platforms can calibrate the board, it doesn't have to be a Python script.
I find the mbient app quite good for my usecase. Choose named group you want to record to (different pair of skis with different sensor groups), choose the config you want to record (its not always only euler angles) and hit record. In the end I would need an app that would look nearly identical...maybe without ambient light and a grey background So I am fine fine here..
So I am fine fine here..
Could this be also a result of a lot of shaking and shocks from the skis I have them mounted on like shown in the video above? Because than I would have this to be accept to be possible and normal
All platforms are above my programming skills - but that is not your problem")

I will find some help on this end....
It could be but it's hard to say for sure. It looks like your data was simply bouncing around the boundary value.
@goamberg If you have a chance, I would highly recommend trying to calibrate a sensor or pair of sensors before a logging session. The calibration has the most effect on the magnetometer data, and calibration is automatic within sensor fusion. If the sensor is not manually calibrated, it will eventually kick in with the automatic calibration. This may produce the sudden offsets that you see. Heading tends to be most linked to the magnetometer.
@Matt said:
@Matt - can you explain please how calibration to use the automatic calibration from c# API?
For the last time, stop hijacking threads with unrelated posts.